IEO科技|自动化
IEO science and technology

ieoBot 3D建模发展过程
ieoBot 双足跳跃模拟
ieoBot 双足 8 自由度腿式机器人的起立视频
Bolt 双足 6 自由度腿式机器人的运动控制视频
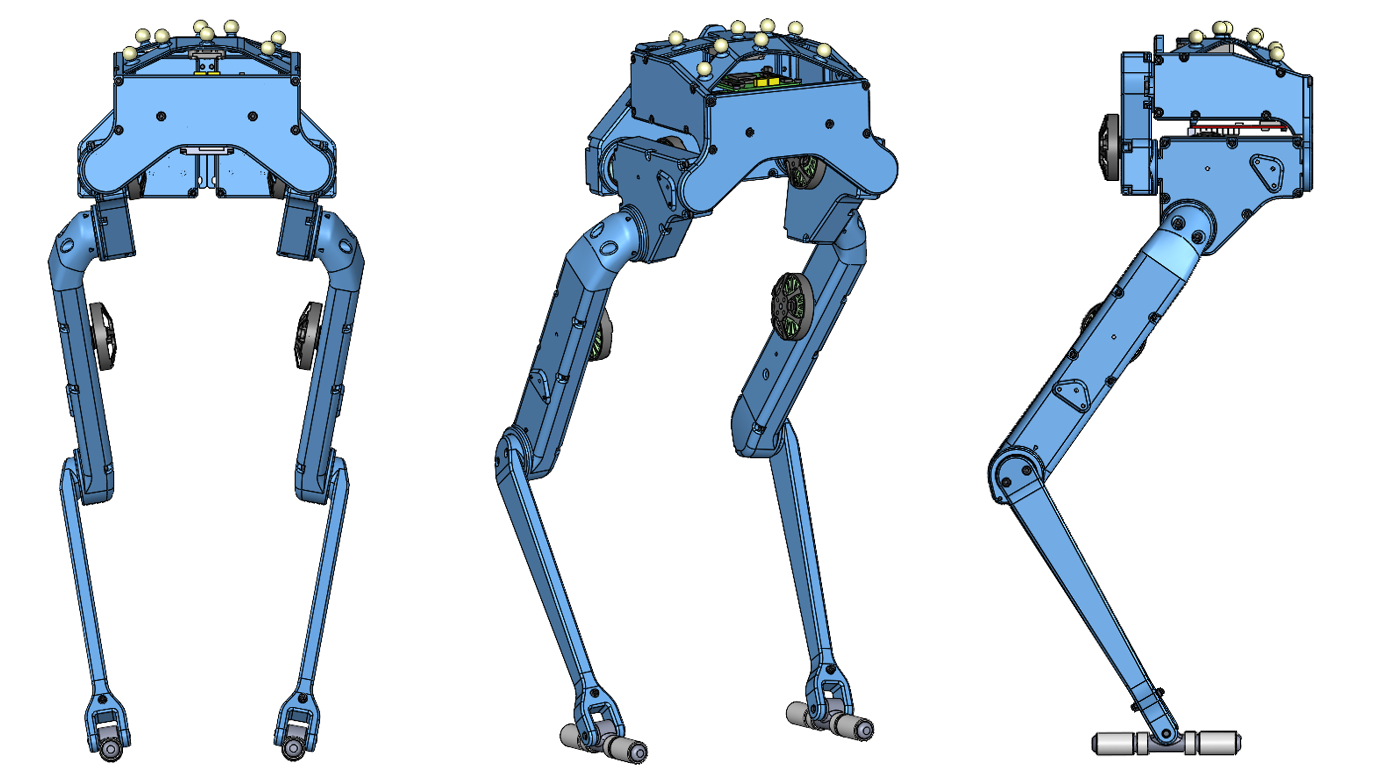
ieoBot双足 6 自由度腿式机器人
产品介绍
ieoBot机器人硬件:
高度约550mm(不含加装双目相机)。
重量约1.5KG(不含电池重量)。
每条腿有 3 个主动自由度和一个被动踝关节。
直流无刷电机,FOC控制, CAN/SPI通讯,1KHz的电机控制频率
十维度传感器,预测机器人的姿态,速度,摔倒等
ieoBot机器人软件系统:
HZD混合零动态技术
RIEKF预测算法
拟人动态稳定算法
裸机+运动控制系统购买链接
预订联系方式:hzf@ieeoo.com
订购发货时间:20天